Controlling the Movement of Single Axes in CFC with a Visualization Template
See the PLCopenSingle2.project sample project in the installation directory of CODESYS under ..\CODESYS SoftMotion\Examples.
Any of the other IEC implementation languages can also be used instead of ST, for example CFC here. This language demonstrates the start and interrupt mechanism of the function blocks. In addition, the different start modes for the MC_MoveAbsolute function block can be tested for rotatory axes.
Insert a virtual drive named
Drivein the device tree below SoftMotion General Axis Pool.Double-click the object to open its editor.
Change the parameters to a rotary drive with a period of 360°.
Axis type: Modulo
Modulo value [u]: 360.0
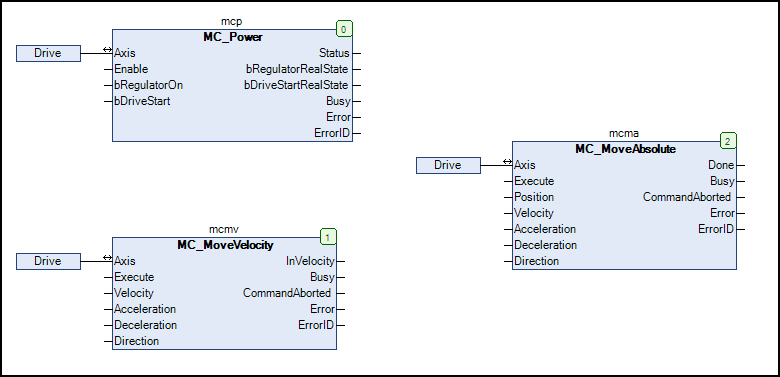
Create a MOTION_PRG program in CFC. Insert the function blocks
MC_Power,MC_MoveAbsolute, andMC_MoveVelocity.It is generally recommended to initialize the function block inputs. Then you do not have to specify the values again and again later when starting this test application.
PROGRAM MOTION_PRG VAR mcp: MC_Power := (Enable:=TRUE, bRegulatorOn:=TRUE, bDriveStart:=TRUE); mcmv: MC_MoveVelocity :=(Velocity:=100, Acceleration:=100, Deceleration:=100, Direction:=positive); mcma: MC_MoveAbsolute := (Position:=180, Velocity:=100, Acceleration:=100, Deceleration:=100, Direction:=positive); END_VARCFC:
Add the call of the
MOTION_PRGprogram to the task MainTask.Add a Visualization object to the application.
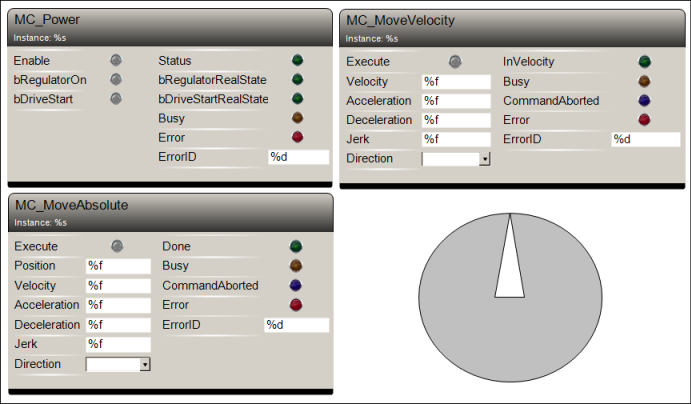
Position the visualization templates VISU_NEW_MC_MoveAbsolute, VISU_NEW_MC_MoveVelocity, VISU_NEW_MC_Power, and RotDrive in the visualization editor. Link these to the function block instances of
MOTION_PRG.Visualization:
Build the project and download it to the PLC. Start the project.
Open the visualization in the editor. Click the Enable input (MC_Power) and then the Execute input (MC_Move_Absolute).
The drive rotates.
Open the Drive virtual axis in the editor.
In the Online part of the General tab, you see the axis motion.
Experiment with the parameters of these function blocks. Change the parameters and observe the behavior.